Clearpath Robotics Heron USV excels at Roboboat 2020

It is always exciting when robotics research can be pushed to its limits, whether in competition or real-world applications. Recently, a research team from the University of Louisiana of Lafayette used a Clearpath Robotics Husky UGV, TurtleBot2, and Heron USV simulator in preparation for RoboBoat 2020; a robotics competition where students must develop their own autonomous surface vehicles. Across a variety of events, teams must test their robot’s manoeuvrability and navigation against numerous situations meant to replicate current challenges in the maritime industry, such as coastal surveillance.
The team was a collaboration between the Department of Mechanical Engineering at the University of Louisiana at Lafayette, the C.R.A.W.LAB, and UL Lafayette RoboBoat 2020.
On land, on sea, online
Though Covid-19 related restrictions meant that the event was digital this year, the competition was still fierce as the teams were required to successfully execute their autonomous surface vehicles and incorporate rigorous technical design documentation and presentations. Once their designs were completed, teams would have to test their autonomous vehicle behaviour through a navigation channel riddled with obstacles with several objectives that included delivering objects, hitting a set manoeuvring speed, and returning safely to dock.
In addition to taking part in robotics challenges, the team is also working towards robotics innovation. The C.R.A.W.LAB at the University of Louisiana at Lafayette, for example, performs automation and controls research across a fairly broad range of applications, from autonomous maritime systems to robots for inspection and maintenance to industrial automation.

RoboBoat 2020 render in Blender 
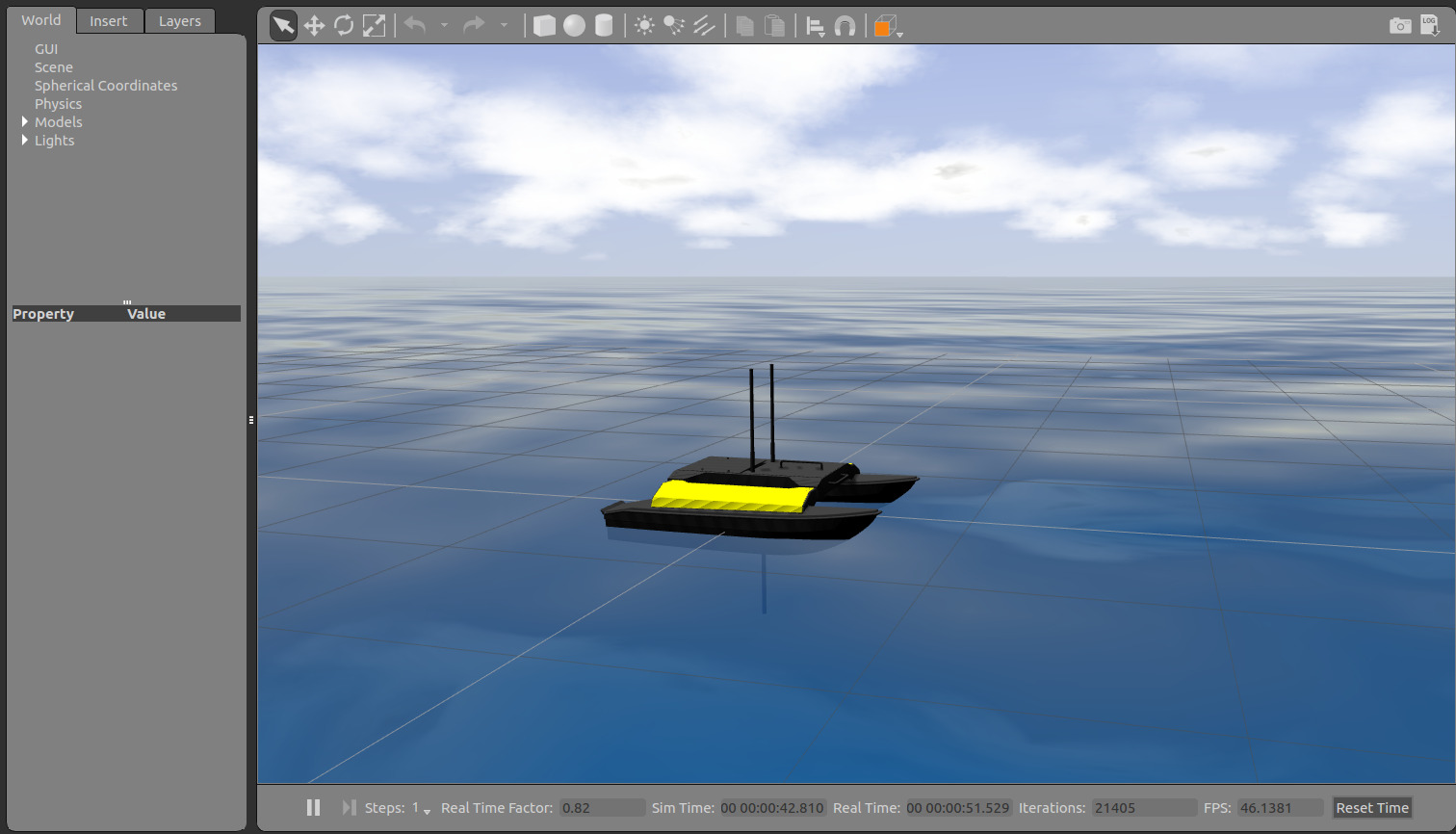
Heron USV


To begin, the team based the simulation of their RoboBoat 2020 entry on the Heron USV platform, saving them considerable time and resources that would usually have been spent entirely developing the simulation from scratch. By using the Heron USV Simulator for RoboBoat 2020 they alleviated two core technical challenges behind developing and implementing systems and algorithms necessary for autonomous maritime systems:
- Eliminating travel to a test location. This would have forced additional time and resources on setting up the necessary power and networking systems as well as time away from the lab.
- Acclimating students quickly to the project and helping them get familiar with the system.
Husky UGV clears a path
The team used ROS/gazebo simulations and the Husky UGV and TurtleBot2 hardware to combat many of these testing challenges. Specifically for RobotBoat 2020, they extensively leveraged the Heron simulation package which they extended to include their own sensor package and thruster configuration. A Clearpath Husky UGV and TurtleBot2 were then used to test their mapping, obstacle identification and avoidance, and path planning algorithms.

On the second place winning boat, the team used Zed cameras and Hokuyo UTM-30LX-EW Scanning Laser Rangefinders on both the bow and stern. These were used for localisation and obstacle avoidance. Also, the set-up had a GPS and IMU. The primary communication between the boat and the shore was Wi-Fi-based, although a separate LoRA-based system was used for the E-stop. Finally, they utilised both Jetson TX2s (for main control and sensor processing) and a Raspberry Pi.
The completeness of Clearpath systems
The team found the Turtlebot2 and Clearpath’s ROS tutorials useful in getting students comfortable with ROS as well as the ROS guides to provide each student with a clear path toward ROS competency. Without the Heron USV simulator, the team would have had to resort to rolling their own ROS/gazebo simulation of the boat, whereas, without Husky UGV or TurtleBot2, they would’ve sunk time and resources into on-water testing. With Clearpath systems, the team was able to save themselves considerable time and effort to focus on their own research.
Overall, the head of the C.R.A.W.LAB, Dr. Joshua Vaughan, enjoyed the stress reliever of having platforms like Husky UGV and Turtlebot2 that are pre-designed and ready to go. As he said, “the ‘completeness’ of the Clearpath systems lets us focus on the higher-level aspects of the research and/or the development for the RoboBoat contest.”