Siete pasos principales para elegir el sistema “drive-by-wire” adecuado

La inmersión en el mundo de los vehículos autónomos (AV) puede parecer abrumador, sobre todo si intentamos determinar cómo poner en marcha el sistema completo de control de vehículos. Para realizar funciones importantes de la conducción autónoma, se deben tener en cuenta varias consideraciones para el desarrollo y la ingeniería de los productos. En primer lugar, debemos preguntarnos lo que significa el sistema drive-by-wire de los vehículos para la investigación y el desarrollo (I+D).
Se trata de la aceleración, sistema de frenado, sistema de dirección y control de movimiento del vehículo. El control de todos estos elementos de forma electrónica es crucial para el desarrollo de los vehículos autónomos. En segundo lugar debemos preguntarnos qué necesitamos. Actualmente, la mayoría de I+D para los vehículos autónomos se realiza a nivel funcional: desarrollando el software para la conducción autónoma, no el sistema Drive by Wire. Sin embargo, este sistema es necesario para poder permitir que se lleve a cabo ese desarrollo.
Una de las decisiones más significativas que debe tomar un desarrollador es montar el sistema Drive-by-Wire (DBW) o bien instalar un kit plug-and-play, como el Kit Dataspeed By-Wire. Se deben tener en cuenta varios factores antes de cualquier desarrollo para evaluar sus capacidades, presupuesto, recursos y el riesgo que supone para el proyecto. Los equipos encargados del proyecto deben valorar la actuación, comunicación, estructura, hardware electrónico, software, potencia, fiabilidad y seguridad.
Puesta en marcha
Para cualquier sistema por cable, el concepto principal de la puesta en marcha es que convierte los comandos del conductor de señales electrónicas a movimientos. Los sistemas de activación están integrados con controles automovilísticos que ayudan a optimizar el rendimiento del vehículo. Su presencia es clave para evitar que la interacción humana sea necesaria para la conducción. Docenas de sensores serán esenciales para obtener información sobre los alrededores y serán estos sensores los que activen los diferentes sistemas de activación, que generarán la orden para activar el componente final. Se debe realizar la misma conversión de señales a movimientos para el sistema de dirección, aceleración, frenado y movimiento para que un sistema por cable funcione.
La puesta en marcha del sistema de dirección del vehículo del pasajero se puede realizar de dos formas: añadiendo un motor externo al sistema de dirección y un controlador para permitir que las señales eléctricas controlen la dirección o bien, utilizar el sistema de dirección eléctrica que ya está incorporada en el vehículo. Si se utiliza la potencia eléctrica, pueden surgir dificultades en el sistema de dirección: comunicación con el motor y problemas de seguridad potenciales. El sistema de dirección de potencia en un vehículo puede ser superior a la acción humana, por lo que debe tenerse en cuenta para evitar el envío de una señal de mala calidad, lo que provocaría un movimiento inesperado del vehículo.
La aceleración es directa, ya que un gran número de vehículos tienen ahora un sensor de aceleración o un sensor de pedal que envía un mensaje al controlador del motor que a su vez controla su aceleración. El sistema de frenado también se puede poner en marcha de dos formas diferentes: se puede colocar un motor y un dispositivo externo en el pedal o en alguna otra ubicación del sistema de frenado o, si desea optar por una solución más segura, se pueden utilizar los motores y el frenado eléctrico que ya está incorporado en el vehículo.
Algunos vehículos tienen un control de estabilidad electrónica que se puede utilizar para aplicar el sistema de frenado según sea necesario. Sin embargo, el inconveniente es que el control de estabilidad no se puede ajustar para detener rápidamente el vehículo en lugar de parar o controlar las dos ruedas al mismo tiempo. Por lo tanto, para compensar esta desventaja, el tiempo de respuesta es inferior al aplicar los frenos y un poco de ruido de motor, ya que no se trata de un sistema de ejecución continuado. La segunda opción, y la más adecuada para el sistema de frenado incorporado, es empezar por un vehículo que tiene un sistema de frenado por cable incorporado, como ocurre en los vehículos híbridos y eléctricos. Este sistema tiene un tiempo de respuesta total, que es igual a las capacidades de un freno de emergencia que requiere la intervención humana.
Al igual que la dirección, la puesta en marcha del movimiento se realiza añadiendo un componente externo para permitir que las señales eléctricas controlen el movimiento o bien, el uso de dispositivos de movimiento electrónicos, aunque se han identificado problemas de seguridad identificados con los vehículos de producción que han implementado los sistemas de movimiento por cable. Los mayores riesgos asociados a este tipo de sistema son que el vehículo no consigue un estado de parada y se mueve en la dirección incorrecta.
Por lo tanto, lo opción más adecuada que se debe utilizar para el elemento de puesta en marcha es lo que ya está instalado en el vehículo, ya que resulta más cómodo aprovechar cualquier medida de seguridad existente y la fiabilidad que aporta, ya que estos dispositivos se han diseñado e incorporado para ese fin.
Estructura de comunicación
Si está utilizando estos dispositivos de puesta en marcha que están incorporados en el vehículo, ¿cómo se puede comunicar con ellos? ¿Cómo se envían las señales? ¿Cómo se controlan? ¿Cómo se evitan las interferencias con otros sistemas que también se están comunicando y provocando errores?
Para utilizar estos dispositivos de puesta en marcha, se debe conocer la estructura de comunicación que da forma a los protocolos del vehículo. Es necesario comprender la red de área informática (CAN, del inglés Computer Area Network) Existen varias CAN que se comunican con diferentes dispositivos del vehículo.
Es importante familiarizarse con los ADAS (Sistemas avanzados de asistencia al conductor) incluidos en el vehículo para que no se desactive ninguna función de seguridad clave mientras se cambian los niveles de comando. Se debe comprender y seguir la lógica y los protocolos del comando de producción para mantener en funcionamiento todos los sistemas operativos y evitar cualquier error que se pueda producir. La comunicación puede ser uno de los obstáculos al desarrollar el sistema DBW, ya que suele estar disponible únicamente a través del OEM original o mediante el proveedor de primer nivel que ha creado ese subsistema específico.
Se requiere el conocimiento de los sistemas de comunicación del vehículo para transmitir correctamente y de forma segura las señales de control necesarias para la puesta en marcha.
Hardware Electrónico
Se trata de controladores necesarios para la comunicación a través del vehículo y se utilizan para procesar los controles de movimiento de bajo nivel y de supervisión de seguridad incorporados en el sistema. Mientras la conversión del vehículo se por cable se realiza internamente o seleccionando un kit DBW externo, es crucial asegurarse que el hardware electrónico funciona correctamente.
Si el vehículo se utiliza en carreteras nacionales, el concepto de seguridad es el que determinará el diseño del procesador, lo que significa que las medidas y el plan de seguridad que se deben poner en marcha suelen estar centradas a nivel del controlador. Además, se debe determinar si esos requisitos de seguridad están en el sistema electrónico actual o necesitan componentes adicionales.
Software
Las consideraciones del software por cable incluyen las interfaces de comunicación, controles de movimiento básicos de bajo nivel y la configuración de medidas de seguridad incorporadas. Los métodos de control de dirección y velocidad son necesarios para el control básico de bajo nivel, con métodos de control de velocidad que incluyen el mantenimiento de una velocidad con una oscilación mínima. Los métodos de dirección o control de orientación implican la forma en la que se controla la orientación, ya sea mediante un ángulo o para un par de dirección.
Las medidas de seguridad se deben desarrollar en el software del sistema por cable, es aquí donde residen la mayoría de los elementos de seguridad para este tipo de control de vehículo. Las nuevas medidas de seguridad como la configuración del conductor durante la conducción, los límites de señales de control y las dependencias de velocidad del vehículo, deben ubicarse en el software del sistema por cable.
Alimentación
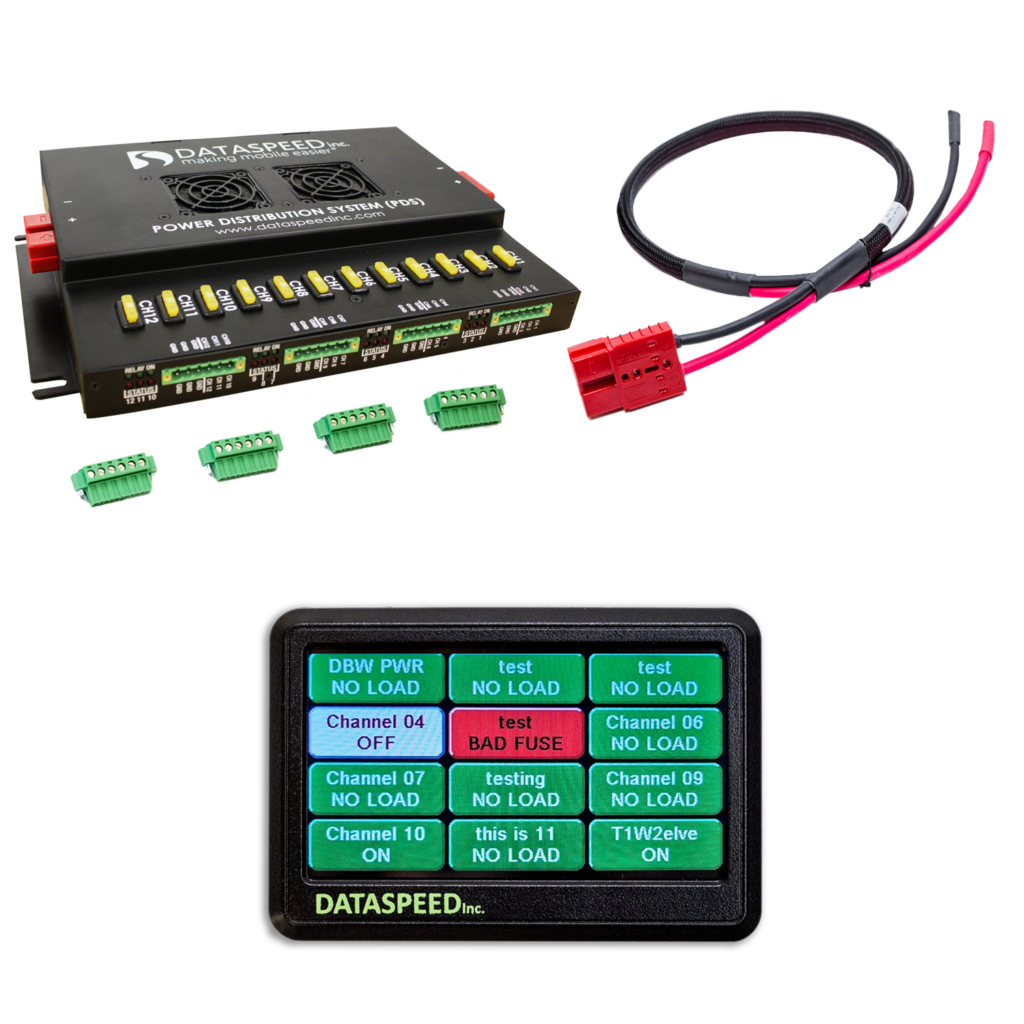
La gestión y distribución de la alimentación son dos de los retos que más se han pasado por alto al desarrollar un vehículo equipado con un sistema de cableado. Los vehículos autónomos se suelen desarrollar en un vehículo de producción modernizado que está diseñado con un sistema tradicional de 12 V. Un vehículo autónomo necesita un conjunto de sensores especializados para poder explorar el mundo, incluyendo cámaras, radaresy sensores LiDAR. Además, el vehículo tiene que procesar los datos con sistemas informáticos avanzados.
Cada uno de estos componentes del vehículo autónomo consume energía eléctrica. Mientras que los sensores individuales pueden no representar la carga de un sistema eléctrico, la potencia consumida por un conjunto de sensores y por el sistema de cableado puede ser crucial. Sin la energía suficiente, los vehículos autónomos pueden sufrir fallos de hardware que potencialmente pueden causar un riesgo considerable tanto para el vehículo como para el entorno que le rodea. Para garantizar que el vehículo autónomo pueda permanecer funcional y que no dependa de nada, es muy importante verificar si existe suficiente alimentación eléctrica para los componentes del sistema por cable, así como para los sensores y otro tipo de hardware.
Fiabilidad
La fiabilidad de un sistema base para un proyecto de I+D es crucial para el éxito de cualquier seguridad activa o desarrollo de vehículo autónomo. ¿El trabajo de desarrollo funcionará a diario cuando se termine? Si no funciona, ¿será fácil de diagnosticar y de reparar? ¿Existen recursos disponibles para realizar la reparación?
El coste del tiempo de inactividad puede afectar al desarrollo de los vehículos autónomos/ADAS. Como consecuencia, cuando un vehículo es la plataforma de desarrollo principal y surgen problemas, todo lo que se haya avanzado se detiene hasta que ese problema pueda arreglarse.
Seguridad
¿Cuáles son las principales preocupaciones sobre seguridad al ejecutar una conversión por cable en un vehículo? Una vez creado un nuevo producto, el vehículo equipado por un sistema de cableado, se generan varios tipos de riesgos que se deben solucionar. Para ello, existen varios y procesos e instrucciones que se deben seguir, pero se pueden clasificar en cuatro pasos básicos, empezando por la realización de un análisis de riesgos. El equipo debe evaluar qué tipo de eventos peligrosos se pueden producir o causar por este nuevo dispositivo.
A continuación, se realiza un análisis de seguridad del sistema para ver cómo se pueden causar esos riesgos debido al diseño y con qué frecuencia se producen. Posteriormente, se deben añadir las medidas de seguridad para paliar estos riesgos y reducir las posibilidades de que ocurran. Por último, se debe comprobar que estas medidas de seguridad funcionan como se esperaba.
La medida de seguridad principal en casi todos los vehículos autónomos es la seguridad del conductor, combinada con el sistema por cable. La seguridad del usuario final es igual de importante que la de los ingenieros que desarrollan el vehículo autónomo. Los sistemas DBW internos personalizados suelen tener un enfoque y estructura dirigida únicamente para el uso de los ingenieros, pero ¿todos estarán a bordo del vehículo? ¿El ingeniero de desarrollo siempre estará presente, al igual que el conductor de seguridad principal? Si existe alguna posibilidad de que la respuesta a esta pregunta sea No, es crucial que existan interruptores de seguridad adecuados para detener los mecanismos disponibles. Si es un comercial el que realiza la demostración, debe tener la capacidad para detener el vehículo rápida y fácilmente desde el modo de conducción autónoma. La mayoría de los sistemas DBW de arranque permiten una parada de emergencia sencilla girando el volante, pisando el freno o activando un botón de parada.

Los equipos de ingeniería deben tener en cuenta siete factores al decidir entre crear un sistema DBW interno o implementar un kit DBW ya disponible, como el kit Dataspeed By-Wire. Estas consideraciones incluyen la actuación, comunicación, estructura, hardware electrónico, software, potencia, fiabilidad y seguridad.
El kit Dataspeed By-Wire proporciona una plataforma única de desarrollo e investigación compatible para las tecnologías de los vehículos autónomos. Permite un control uniforme sobre el acelerador, freno, dirección y movimiento del vehículo para permitir la prueba de aplicaciones de los vehículos autónomos. Tiene un control electrónico completo con pequeñas modificaciones para el vehículo y sin añadir ningún sistema de puesta en marcha, garantizando que todas las funciones de seguridad del nivel de producción permanezcan intactas y con un funcionamiento total. Al implantar el kit Dataspeed By-Wire, el equipo de desarrollo puede reasignar el tiempo de enfoque sobre el sensor y el desarrollo de algoritmos en lugar de los recursos y riesgos asociados a la creación de un sistema personalizado.