LiDAR and digitalising freight train operations

Blickfeld, the cutting edge LiDAR provider, recently took part in a project which saw sensor data fusion contributing to the digitalisation of freight train operation. Their Cube Range 1 LiDAR sensor played a key role in supporting track monitoring for the safe and efficient shunting of freight trains.
A consortium in Germany is developing a system for track monitoring – the SAMIRA Shunting Assistant System. The system is to monitor the track area when shunting freight trains, even when reversing, and involves fusing LiDAR point clouds with camera data to reliably detect objects. This digitisation makes the process more efficient, reduces resources and lays the foundation for autonomous rail operations.
The challenges of manual monitoring
Traditionally the shunting of freight trains has been a two-person job. For example, if the train is reversing a shunting assistant has to monitor the rear carriage and alert the driver via radio if there are any obstacles on the track area. This is a high-risk task that is carried out in all winds and weather and is not easy to recruit for.
Although the drivers can take on this task themselves via remote control, this is not an ideal solution as they must undertake the time-consuming task of walking along the length of the train when changing direction.
Keeping things moving with sensor fusion
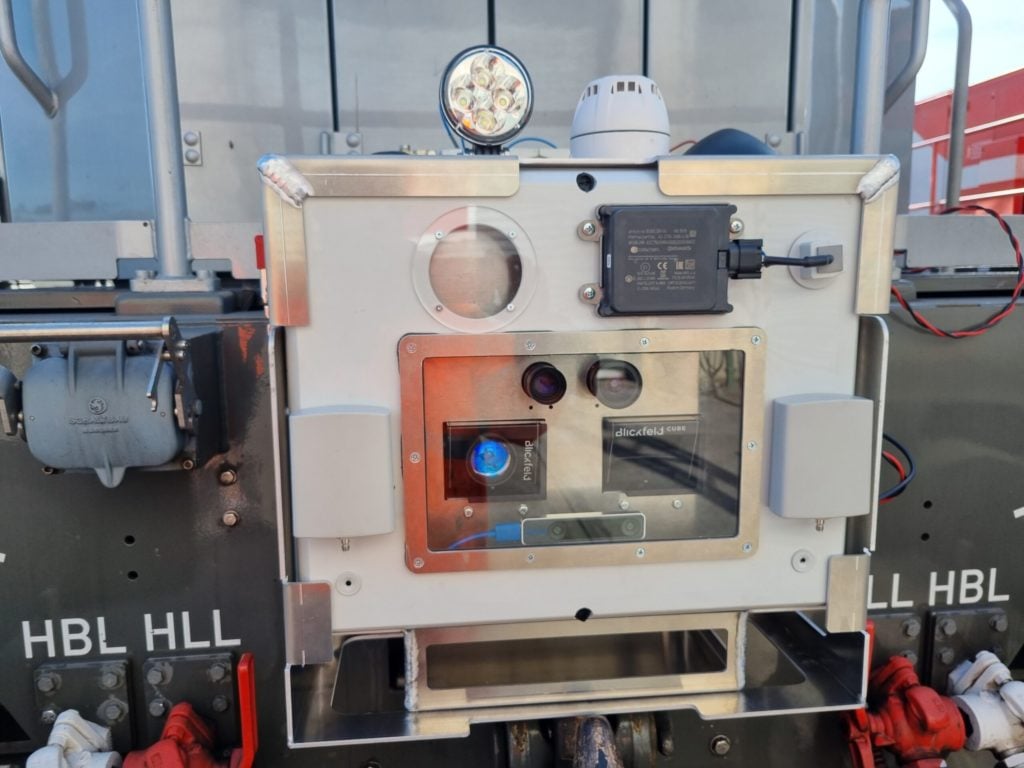
To address this challenge the project team is developing an assistance system for shunting freight trains to take over track monitoring. This portable, battery-powered device is attached to the end of the train. It contains a suite of sensors for detecting the environment and a computer for data processing.
The integrated sensors include two Blickfeld LiDAR sensors for 3D obstacle detection, a stereo camera for close-range detection, two additional cameras that provide the data basis for algorithm-based object detection, and a radar sensor. Additionally, the system has an acoustic warning signal. The driver is equipped with a tablet in the cab that displays a live feed of the track area behind the train, indicating objects, pedestrians, signals, or other vehicles in the monitored area.
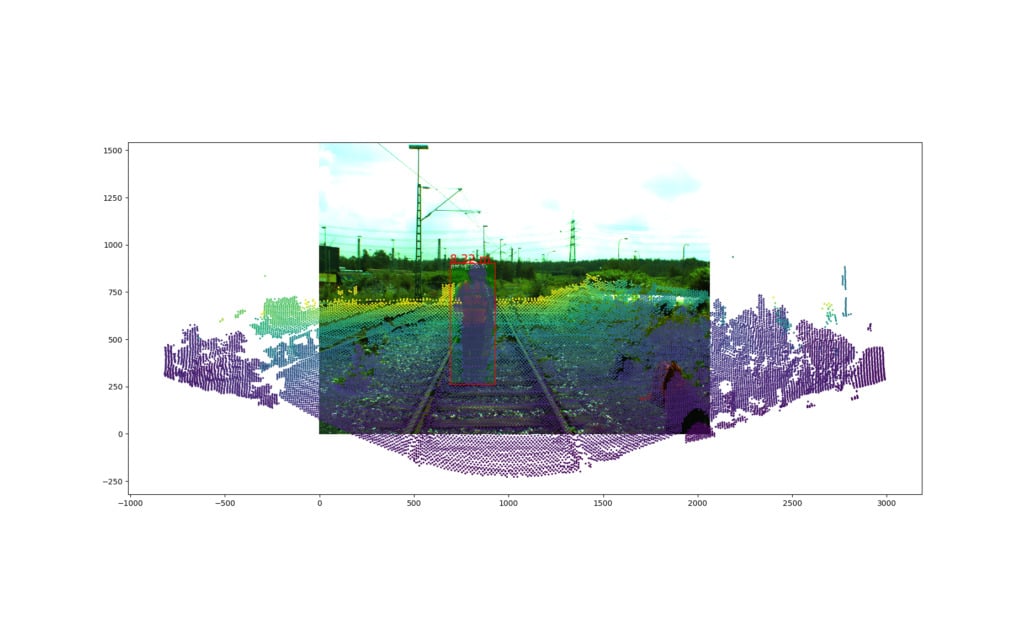
These objects are detected by fusing camera images and 3D point clouds. Image recognition algorithms identify the track area and objects, such as pedestrians or vehicles, based on the camera image. Fusing this with the point cloud data then determines the exact position of the detected objects, thus ensuring that the train’s path is clear when reversing, without the need for a shunting assistant.
The Blickfeld Cube Range 1 was selected for the project as its 70° horizontal field of view is ideal for keeping an eye on the track area even when driving slight curves. It was also necessary to use a highly robust sensor due to high vibration in railway operations, something that the solid-state Cube Range 1 delivers in spades. The high resolution of the point cloud data and the low price of the sensor were also advantageous.
Foundations for autonomy
To further safeguard shunting operations there are plans for introducing stationary modules for track inspection. Placed behind curves or other sections that are difficult for the driver to see, the system could send a live feed to the driver’s cab so that braking can be initiated in sufficient time if necessary. This technology could serve as the first step toward autonomous operation.
Level Five Supplies offers a comprehensive portfolio of LiDAR products from some of the world’s leading manufacturers ensuring that you can find the perfect sensing solution for your application.
We also offer a range of specialist training courses, designed to complement our other services and accelerate the tricky early stages of integration. Our courses offer the ideal combination of theory and practice, ensuring you develop a sound working knowledge of LiDAR hardware and software.