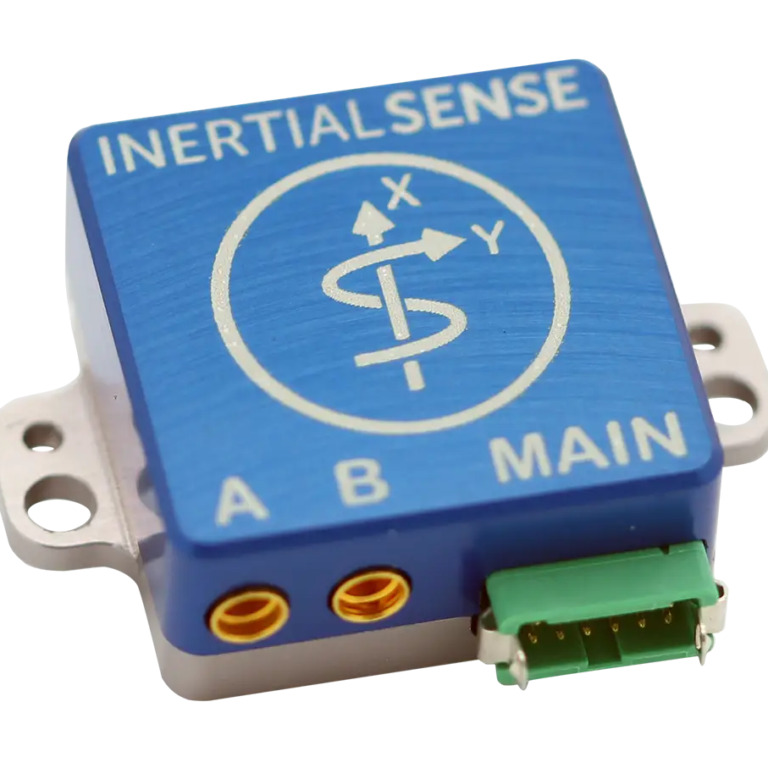
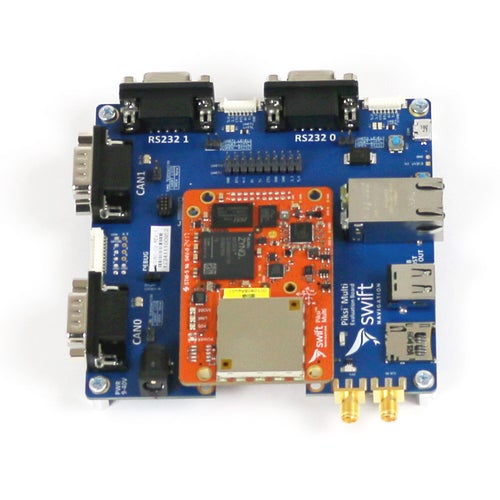
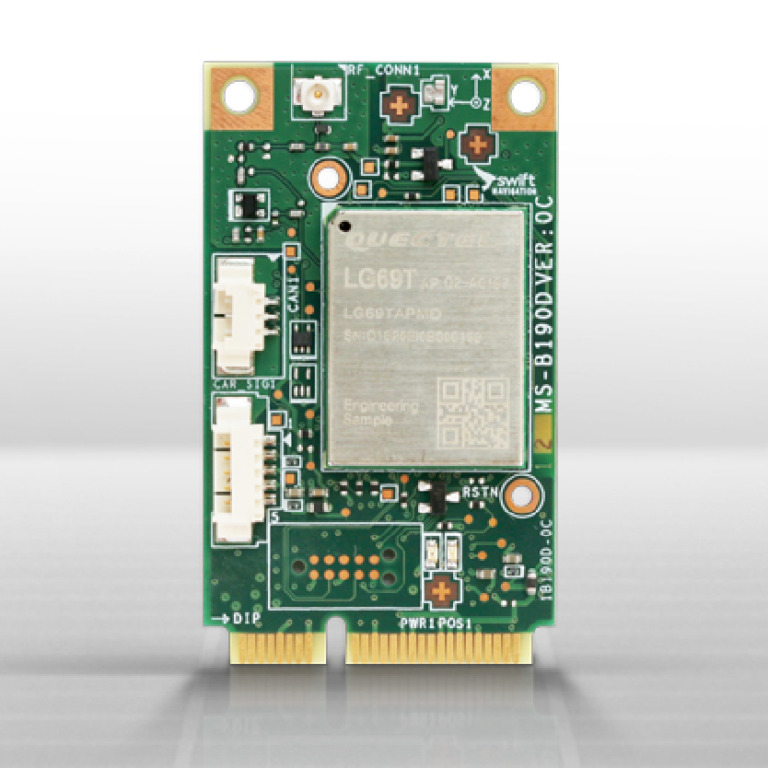
Positioning
Including satellite positioning and inertia measurement – Locate your vehicle, back up the system and fine tune with antennas.
Showing all 9 results






Want to know more about Positioning?
Although robots are great, it’s actually best talking to our humans to get advice and support on your autonomy journey…