Clearpath Warthog UGV pushes the limits of autonomous navigation

Winter’s extreme challenges are something that Canadians know well, with weather and terrain often unforgiving and hazardous when venturing north during the colder months. Yet, research and exploration continue to take on the challenges of northern conditions – a team from Northern Robotics Laboratory (Norlab) at Laval University in Quebec is using the Clearpath Robotics Warthog UGV in a project pushing autonomous robotic navigation to its limits in these challenging, snowy environments.
Norlab occupies a unique position as it specialises in mobile and autonomous systems working in northern and difficult conditions. By developing and exploring navigation algorithms, Norlab is focusing on creating a robust mobile robot that can quickly adapt to a variety of real-life weather and terrains. Specifically, they are developing localisation algorithms for LiDAR and 3D reconstructions of environments in situations where such tools often struggle. These tests are carried out across 400+ km2 of the Montmorency forest north of Quebec City, which is covered in snow for around half of the year.
A Warthog in the SNOW

The SNOW (Self-driving Navigation Optimised for Winter) project aims to innovate current technology to improve autonomous driving in environments that winter conditions render unstructured and dynamic. A partnership with General Dynamics Land Systems – Canada (GDLS-C) enables them to ground themselves in real-world applications. This type of technology is integral for a variety of applications, including autonomous refuelling and navigation, search and rescue missions, Canadian Arctic Sovereignty, and freight transport on Northern ice roads.
Using Warthog UGV, one of Clearpath Robotics largest all-terrain platforms, the Norlab team creates maps that allow the platform to adapt to environmental changes caused by snow and wind, while also allowing a robust localisation of the vehicle in real-time. These maps also serve as the foundation for novel path planning algorithms handling deformable obstacles and environments, such as deep snow under a vehicle.
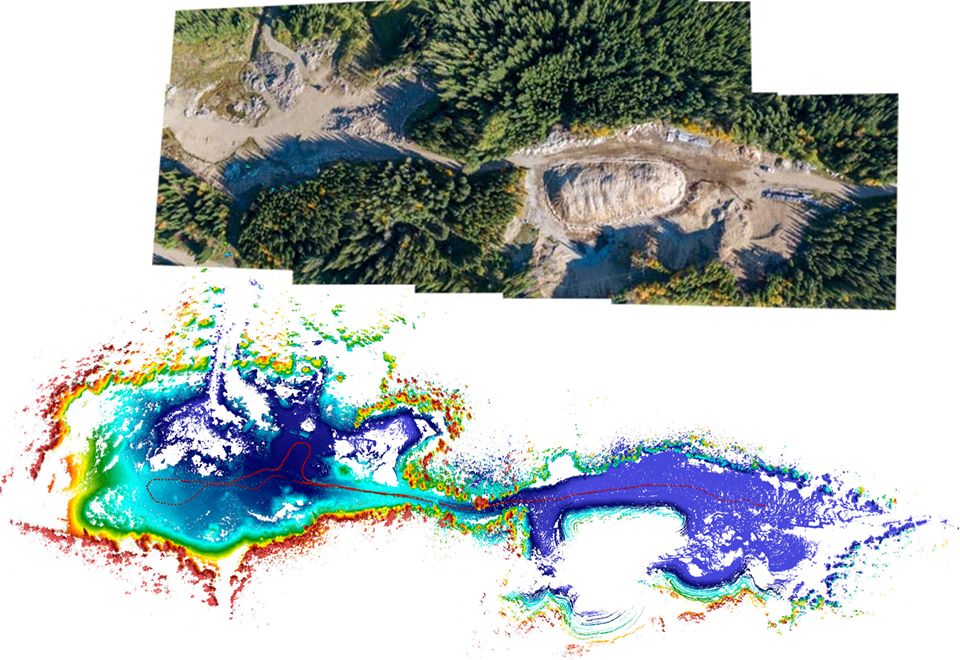
Norlab equipped the highly customisable Warthog with one 32 channel and two 16 channel LiDARs, while an Iterative Closest Point (ICP) algorithm takes the point clouds from these sensors to localise the robot and map the environment. To aid localisation, an IMU is used with the wheel odometry of the platform. GNSS localisation is then facilitated by two GNSS antennas while an array of three Trimble theodolite prisms and total stations provide ground truth localisation of the UGV. Finally, an embedded computer was also added to compute the high-level algorithms required for autonomous navigation.

Robust, all-terrain capabilities

Numerous obstacles mean that the project is not short of challenges. Snowfall and unpredictable environments make localisation and mapping more difficult. Allied with the fact that the autonomous robot must be able to navigate and overcome snow and ice obstacles, which are standard for winter. Warthog’s robust, all-terrain capabilities ensured that these challenges were easily overcome. Thanks to its easy start-up with simplified integration and ROS-ready capabilities, the Norlab team was able to focus on other aspects of their research, increasing effectiveness and efficiency.
Also, by not having to build a platform from the ground up, Norlab could chart out a more ambitious timeline and allocate their time appropriately. Furthermore, Warthog’s size, traction, and low ground pressure allow it to tackle difficult terrains where other robots would fail. Norlab has also modified their Warthog with tracks in order to lift the robot above deep snow. By enabling navigation in such extreme environments, Norlab is able to develop complex and advanced localisation algorithms.
Team lead, Dr François Pomerleau, said “The Warthog is a great research platform because of the ease of integration with various sensors. It is also a very mobile platform, which is perfect for our project, which aims to push the limits of what is accessible by autonomous mobile robots.”Contact our sales team today and discover the advantages of Clearpath’s range of mobile robots